"устройство для тренировки "бесконечная лестница"
Патент 1738295
Авторы
Классы МПК
"устройство для тренировки "бесконечная лестница"
Иллюстрации



Реферат
Использование: спортивная тренировка , реабилитация больных. Устройство состоит из корпуса, поручней, неподвижных ступеней и двух шарнирных четырехзвенников, верхней частью которых являются две подвижные полуступени Шарнирные четырехзвенники функционально связаны квазироторами линейных асинхронных двигателей трубчатого типа. В конечных положениях касания рычагов четырехзвенников имеются резинопневматические амортизаторы, верхние - связаны с рычагом , регулирующим ход четырезвенников, а следовательно, и высоту ступени, а нижние - с датчиками положения. Полуступени имеют подпружиненные полики-индикаторы нагрузки, связанные с блоком управления с линейными двигателями и датчиком положения так, что линейный двигатель нагруженной ступени выключается, а линейный двигатель свободной ступени включается в сторону подъема. При опускании ступени линейный двигатель работает в режиме противовключения на притормаживание . 1 з.п. ф-лы, 3 ил. сл С
СОЮЗ СОВЕТСКИХ
СОЦИАЛИСТИЧЕСКИХ
РЕСПУБЛИК (19) (11) (s1)s А 63 В 22/04
ГОСУДАРСТВЕННЫЙ КОМИТЕТ
ПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМ
ПРИ ГКНТ СССР
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ (21) 4707683/12 (22) 19.06.89 (46) 07,06,92. Бюл. М 21 (71) Одесский медицинский институт им. Н.И. Пирогова и Южнь|й научно-исследовательский и проектно-конструкторский институт морского флота (72) Е.П. Бойко и Э.В, Смрковский (53) 685. 648(088.8) (56) Авторское свидетельство СССР
N 1457937, кл, А 63 В 22/04, 1987, (54) УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ
"БЕСКОНЕЧНАЯ ЛЕСТНИЦА" (57) Использование: спортивная тренировка, реабилитация больных. Устройство состоит из корпуса, поручней, неподвижных ступеней и двух шарнирных четырехзвенников, верхней частью которых являются две подвижные полуступени. Шарнирные четыИзобретение относится к медицине и спорту, а именно к устройствам для тренировки и развития функциональных возможностей организма взрослых и детей в процессе физической тренировки, а также реабилитации больных, Известен в различных модификациях тренажер типа ступеньки, позволяющий имитировать ходьбу по лестнице и представляющий собой деревянный ящик переменной высоты с 1, 2 и 3 ступеньками.
Тренирующийся совершает подъем и спуск по ступенькам в определенном ритме за определенный промежуток времени. Затем по формулам определяется величина выполненной работы. рехзвенники функционально связаны квазироторами линейных асинхронных двигателей трубчатого типа. В конечных положениях касания рычагов четырехзвенников имеются резинопневматические амортизаторы, верхние — связаны с рычагом, регулирующим ход четырезвенников, а следовательно, и высоту ступени, а нижние — с датчиками положения. Полуступени имеют подпружиненные полики-индикаторы нагрузки, связанные с блоком управления с линейными двигателями и датчиком положения так, что линейный двигатель нагруженной ступени выключается, а линейный двигатель свободной ступени включается в сторону подъема. При опускании ступени линейный двигатель работает в режиме противовключения на притормаживание, 1 з.п. ф-лы, 3 ил, Недостатком тренажера является то, что наступание на сгупеньки требует совершения лишних шагов на выполнение поворотов или движений спиной вперед, а также невозможность изменения высоты ступеньки, сложность расчетов выполненной работы, необходимость соблюдения определенного ритма движений и др, Известно используемое в медицине и спорте тренажерное устройство для суставов, сердца и кровообращения в виде двух опор для ног, которые могут совершать вертикальные возвратно-поступательные колебательные движения вокруг общей точки поворота, причем опускание одной вызывает подъем второй. Момент и скорость опу1738295 скания каждой опоры задаются регулято- ными с возможнос ром механизма гидравлического давления. ми положе ностью управления датчикаположения подвижных поликов и датИзвестен тренажер-лестница в виду чиками по положения ступеней, блока двух расположенных рядом наклонных до- управления слогиче я логической схемой переключерожек, на каждой из которых установлена 5 ний а для об ля о еспечения плавного подъема и одна подвижная ступенька, Длина хода сту- спуска полуступеней ч ть луступенеи, четырехзвенники хними и нижними резиноппенек при их движении не ограничена. По- снабжены верхним ложением ступенек управляет разомкнутая невматичес ч скими амортизаторами, при этом гидравлическая система, регуляция давле- верхние амор е амортизаторы установлены на рым жностью регулирования тягония в которой определяет частоту движения 10 чагах с возможность вого усилия, т,е. хода четырехзвенников.
Недостатком известных тренажерных Движение полус ние полуступеней осуществляетустроиств является то, что движение ступе- ся с помощ мощью квазироторов линейных асинвигателеи труочатого типа, нек совершается в определенном ритме, хронных двига технологически ходьба выполняется в виде 15 работаю щих в режимах подъема и приторопускающихся полуступеней с переступания ногами, по типу педалирова- маживания опуска ния, без подъема массы тела, поскольку ка- помощью б ью лока управления, что создает сание ступенек включает гидравлическую точност систем . П и т ь и мягкость хода и касания резиких амортизаторов рычагасистему. ри этом имитациядвижения чело- нопневматических ам
ы ехзвен ников и позволяет века вверх по лестнице недостаточно четко 20 ми четырехз реализуется, что снижает величину выпол- отказаться от от магнитных замков-упоров, няемой физической работы и затрудняет ее трособлочно чной системы и амортизаторов— б ют определение, Гидравлические системы тре- накопителей энер энергии, при этом устраняется о служивания.
6 уют постоянного контроля и техническогг необходимо димость предварительного опреде25 ления массы тела испытуемого и регулировИзвестно устройство для тренировки ки устро ойства на эту массу. Наличие
"Еесконечная лестни а", со е жа ст пени т ц ", содержащее две рычагов,ограничивающихходчетьре у, ус ановленные на основании ников, аследовательн, со е жа, хзвенл „овательно, и ход полуступеней посредством параллельных шарнирных позволяет регулир овать высоту подъема ночетырехзвенников с возможностью ограни- 30 ги, т.е., т.е. расстояние между полуступенями в фиксированных положениях в ченного возвратно-поступательного движе- конечных фикси ов ния, связанные трособлочной системой с вертикальной плоскости, что обеспечивает
Ст и амортизаторами — накопителями энергии, возможность расшир 6 упени снабжены подпружиненными пол- зов-ни ус ирения о ласти исполь ния устроиства, в частности, для любых иками — индикаторами наличия нагрузки, 35 возрастных групп, в том числе и детей. электрически связанными с электромагнитными замками- по ами. р ойство позвол
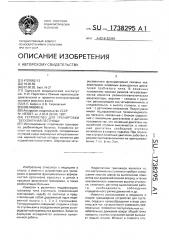
-у рами. Тренажерное уст- сбоку(боковая крышка н ) ф . 2— в ляет имитировать движение же. вид сверху (непо вижн ые ст вверх по лестнице.
Не ики сняты); на фиг, 3 — функциональная ема управления работой тренажера. едостатком является необходимость 40 блок-схема и ав б предварительного взвешивания тренирую— Устройство стройство состоит из корпуса 1 с пощегося с последующей установкой регуля- ручнями 2, неподвижных с ных ступеней > и двух ст ойствонем р ре ажере на эту массу, кроме того, полуступеней 4(фиг. 1), fl у р т неможетбытьиспользованодля ются верхним зве и иг. ), олуступени 4 являетей хним звеном шарнирных чет ipexнников, о разованных рычагами 5 и б и д т й, поскольку высота ступеней равна 25 45 звенников об а см, характеризуется конструктивной слож- . основанием 7, К ностью и б м, аждая полуступень 4 имеет . трособлочной системы и амортизаторов. ж 9, 10
ый полик, подпружиненный при большой металлоемкостью за счет подвижный и 8, у жинои, датчик 10 положения полика и
Цель изобретения — повышение эффек- складывающуюся што к 11. К тивности т ени овки р р вки путем обеспечения 50 рехзвенник функционально связан с квазивозможности изменения диапазона возра- о стных категорий тренирующихся. ротором 2 линейного асинх онног
12 онног
Поставленная ель двигателя 13 трубчатого типа. В крайних и иво пе ем оставленная цель достигается тем, что нижних и верхних полож р д ремещения шарнирных ч тырех- ники упираютс и ложениях четырехзвензвенников с п л раются в резинопневматические ков с полуступенями и подвижными 55 амортизаторы 14 и 15 поликами — ин икат ры и, а в нижних положе— ндикаторами наличия нагрузки ниях — и в датчики 16 с атчик д ами положения поликов, выполнен Между зо ики положения ступеней. в виде линейных асинх онных виг т жду зонами движения ст пеней жду зо у установт бчатог р дв гателеи лена вертикальная перегородка 17. В ру о типа, квазироторы которых сое- резинопневм т чв г т . ерхние динены с четырехзвенниками, установлен- TBH08ëeH евматические амортизаторы 15 усновлены на рычагах 18 соответственно.
1738295 положение которых может быть изменено с помощью винтов 19 и маховиков 20 (фиг, 2).
Положение рычага 18 как регулятора тягового усилия определяет ход шарнирных четырехзвенников, а следовательно, и ход полуступеней, т.е. расстояние в вертикальной плоскости между ступенями, Функциональная блок-схема управления работой тренажера (фиг. 3) включает датчики 10 положения поликов, асинхронные линейные двигатели 13 трубчатого типа, датчики 16 положения ступеней, регуляторы тягового усилия — рычаги 18 и блок 21 управления приводом с блоком 22 переключений.
Устройство работает следующим образом, До начала работы устройства обе полуступени 4 находятся в нижнем положении, упираются в резинопневматические амортизаторы 14, рычажные системы воздействуют на датчики 16 положения ступеней, устройство обесточено. Маховиками 20 устанавливается необходимый для испытуемого ход движения четырехзвенников и полуступеней 4, т,е, высота между ступенями, Устройство включается в электрическую цепь, Полуступени остаются в прежнем положении. поскольку датчики I0 положения полика и положения ступени 16 находятся в положении "Выключено", Испытуемый с неподвижной ступени 3 наступает левой ногой на левую полуступень 4, При этом подвижный нолик 8 утапливается, сжимая пружину 9, и переводит датчик 10 положения полика в положение "Включено", замыкая тем самым в блоке 22 переключений цепь реле правого двигателя 13.
Подвижный полик 8 правой ступени находится в верхнем положении, датчик 16 положения ступени — в свободном положении.
При включении датчика 10 положения полика левой ступени включается цепь реле правого двигателя 13, замыкаются контакты, резисторы зашунтированы и полное напряжение подается на двигатель 13, подымая правую полуступень 4 в верхнее положение и удерживая ее усилием продолжающего работать двигателя 13, Шторка 11 находится в раздвинутом положении.
Испытуемый правой ногой наступает на правую полуступень 4, находящуюся в верхнем положении, подвижный полик 8 утапливается, датчик 10 положения полика переводится в положение "Включено", Одновременно за счет отрыва левой ноги от левой полуступени 4 отжимается палик 8 и датчик 10 положения полика переходит в положение "Выключено". В блоке 21 управления и блоке 22 переключений выключает5
20
40
55 ся реле, и цепь правого двигателя 13 и полуступень 4 на рычагах 5 и 6 под действием массы тела испытуемого начинает опускаться, Шторка 11 складывается. Однако включенный датчик 10 положения правого полика через блок 21 управления вновь включает через блок 22 переключений правый двигатель 13, но уже на пониженное напряжение за счет включения резисторов.
Сопротивление резисторов за счет перемещения ползуна снижается до значения, Когда начинается работа правого двигателя 13 в режиме.противовключения и тяговое усилие направлено встречно направлению движения квази ротора, что вызывает притормаживание опускающейся правой полуступени 4 и обеспечивает ее мягкое касание резинопневматического амортизатооа 14, При достижении крайнего нижнего положения рычаг 6 шарнирного четырехзвенника упирается в амортизатор 14, датчик 16 положения ступени занимает конечное положение и его контакты через блоки 21 и 22 выключают правый двигатель
13.
Одновременно в блоках 21 и 22 замыкаются контакты реле, обеспечивающие включение левого двигателя 13 при зашунтированных резисторах, левая полуступень 4 "взлетает" вверх до упора рычага
5 в верхний резинопневматический амортизатор 15 и удерживается в этом положении усилием работы двигателя 13 при полном напряжении. Шторка 11 раздвигается и закры вает п роем под полуступе ныл 4.
Затем испытуемый совершает постановку левой ноги на левую полуступень 4, находящуюся в верхнем положении за счет работы двигателя 13 в режиме подъема. При переносе массы тела испытуемого на эту полуступень 4 и отрыве правой ноги от правой полуступени 4 подвижный палик 8 воздействует на датчик 10 положения полика и переводит его в положение "Включено".
Одновременно на правой полуступени 4 подвижный полик 8 отжимается, освободившись от массы правой ноги, и датчик 10 положения полика переходит в положение
"Выключено", Через блок 21 управления и блок 22 переключений выключается левый двигатель 13, и полуступень 4 начинает опускаться под влиянием массы тела испытуемого. На половине хода спуска полуступени.
4, аналогично описанному выше для правой полуступени 4, включается левый двигатель
13 в режим противовключения, притормаживая полуступень 4, и она плавно касается рычагом 6 резинопневматического амортизатора 14. Датчик 16 положения ступени запирае напряжение через блок 21 управ1738295 ления и блок 22 переключения, и левый линейный двигатель 13 выключается. Шторка
11 складывается. Правая полуступень 4 уже находится в верхнем положении с упором в резинопневматический амортизатор 15, и правый двигатель 13 продолжает работать в режиме подъема, шторка 11 раздвинута, Затем испытуемый совершает подъем и постановку правой ноги на правую полуступень 4 и т,д. поочередно обеими ногами, как при движении по реальной лестнице. Темп движения, высота ступени и время тренировки определяются задачами, поставленными перед ним. Быстродействие системы на порядок выше времени на один шаг, даже при быстрой ходьбе. Одновременно могут проводиться необходимые функциональные исследования, для чего перед тренировкой на испытуемого накладывают соответствующие электроды от аппаратуры.
Формула изобретения
1. Устройство для тренировки, содержащее установленные на основании с поручнями неподвижные ступени и две полуступени с приводом перемещения, установленные посредством двух шарнирных четы рехзвенн иков, взаимодействующих с
5 упорами и с размещенными под поликами полуступеней и на основании датчиками положения полуступеней, соединенными с блоком управления приводом, о т л и ч а ющ е е с я тем, что, с целью повышения
10 эффективности тренировки путем обеспечения возможности изменения диапазона возрастных категорий тренирующихся, привод перемещения выполнен в виде двух линейных асинхронных двигателей трубчатого
15 типа, квазироторы которых шарнирно соединены с рычагами четырехзвенников, а обмотки каждого двигателя соединены с блоком управления приводом.
20 2, Устройство по п.1, о т л и ч а ю щ е ес я тем, что упоры выполнены в виде амортизаторов, 1738295
Составитель Е,Бойко
Редактор В,Петраш Техрер M,Ìîðãåíòàë Корректор М.Демчик
Заказ 1950 Тираж Подписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР
113035, Москва, Ж-35, Раушская наб., 4/5
Производственно-издательский комбинат "Патент", г, Ужгород, ул,Гагарина, 101