"гимнастический аппарат "многоярусные турники"
Патент 1837924
Авторы
Классы МПК
"гимнастический аппарат "многоярусные турники"
Иллюстрации


Реферат
СОЮЗ СОВЕТСКИХ
СОЦИАЛИСТИЧЕСКИХ
РеспуБлик (s))s А 63 .1 3/00
НОЕ ПАТЕНТНОЕ
ССР
СР) ПАТЕНТУ
2 (2 (2 (4 (7 (5
Е (5
Г (5
Ы ст ст тр и
3 и но ж по со н по ра ск си ко ве
) 4805829/12
) 30.03,90
) 30.08.93, Бюл, N 32
) А.M.Ïàðøèí
) "Советский цирк". сборник под ред. г.Кузнецова,1918-1938, М.— Л.: Искусст, с. 231, ) ГИМНАСТИЧЕСКИЙ АППАРАТ "МНОЯРУСНЫЕ ТУРНИКИ"
) Изобретение относится к оборудованию я цирков и позволяет расширить трюкое возможности и удобство в пользовании.
Изобретение относится к оборудоваю для цирков и может быть использовано я выполнения трюковых номеров гимнаки, Целью изобретения является расширее игровых возможностей.
На фиг. 1 изображен общий вид гимначеского аппарата; на фиг. 2 — вид сбоку ковой рамы в исходном положении и ле перемещения ее по вертикали; на фиг. вид сбоку рамы в исходном положении и повороте ее; на фиг. 4 асположение всех трюковых рам на развысоте; на фиг. 5-10 взаимное располоние трюковых рам (в вертикальном ожении) при установке их на разной вые; на фиг. 11-16 — взаимное расположее трюковых рам при вертикальном ожении центральной рамы, а боковых — в плоскостях, перпендикулярных плости центральной рамы; на фиг. 17-22— метричное расположение боковых трюых рам под углом 45 по отношению к тикальной трюковой центральной раме:. Ж 1837924 А3
Гимнастический аппарат содержит по меньшей мере три перекладины, установленные в горизонтальных параллельно одна относительно другой и приспособление для натяжения. По крайней мере одна из перекладин имеет сьемную П-образную рамку, концы которой шарнирно соединены с перекладиной с образованием трюковой рамы, усгановленной с возможностью вращения относительно продольной оси перекладины. При этом трюковая рама установлена с возможностью вертикального и углового перемещения, 35 ил. на фиг. 23 — 28 — несимметричное расположение боковых рам по отношению к центральной вертикальной раме при установке их под углом 45 к плоскости центральной трюковой рамы; на фиг. 29 — трюковые рамы в момент их вращения, при расположении боковых рам на одном уровне и их высоте, меньшей высоты установки центральной рамы; на фиг, 30- неразъемная шайба; на фиг. С0
31 — узел соединения перекладины с конца- (ь) ми П-образной рамки и с неразьемной шайбой; на фиг. 32- быстроразьемный карабин; на фиг. 33-35 — одно-, двух- и трехрядные блоки.
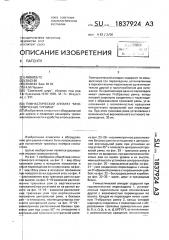
Гимнастический аппарат содержит три горизонтальные перекладины 1, установленные параллельно одна относительно, другой с возможностью перемещения по {,Д высоте. Каждая иэ перекладин имеет съемную П-образную рамку 2, концы которой шарнирно соединены с перекладиной с образованием трюковых прямоугольных рам (а. б. а. г), (д, е, ж, з), (а б в г ), установленных с возможностью вращения относительно
1837924 продольной оси перекладины 1. Каждая трюковая рама имеет средство для изменения ее положения по высоте и для измене-. ния ее угла наклона, включающее трособлочную систему. Тросовая система каждой рамки незамкнутая. Она состоит из отрезков тросов с быстроразъемными соединениями на концах, например, коушами или карабинами, отрезки тросов соединяются в точках соединения А. В, С посредством неразъемных шайб 3. Тросовая система каждой рамы обкатывает закрепленные на колосниках (под куполом цирка) одно, двух и трехрядные блоки 4 и установленные на арене блоки 5, 6. Тросовая система каждой рамы содержит натяжной элемент 7, благодаря чему осуществляется натяжение тросовой системы и обеспечивается жесткость при установке аппарата для работы в манеже, 20
В качестве натяжного приспособления могут быть. использованы полиспасты или талрепы. Тросовая система каждой трюковой рамы несколько раз обкатывает ба. рабаны с электроприводом. На концах 25 перекладин 1 крепятся концы П-образной рамки 2, и неразъемные шайбы 3 для заделки коушей для тросовых растяжек. Узел соединения перекладины с концами рамки (фиг. 31) содержит корпус подшипника 8, 30 подшипник 9 с. крышкой 10, установленный на конце перекладины, распорную втулку11 с неразъемной шайбой 3 и разрезной гайкой
12. На корпусе подшипника 8 посредством резьбы закрепляется конец П-образной 35 рамки 2, Неразъемная шайба 3 предназначена для крепления.тросовой системы с коушами к перекладине, Отрезки тросов крепятся к шайбе посредством быстроразьемного.карабина. Карабин состоит из цент- 40 рального стержня 13 с продольным отверстии и подпружиненным стаканом 14.
В верхней части стержня закреплена резьбовая втулка 15 с продольной прорезью для фиксирующего штифта 17, 45
В нижней части стержня шарнирно установлен язычок 18, При перемещении стакана 14 вверх язычок 18 освобождается, за счет чего происходит расфиксация замка карабина. 50
При этом происходит расфиксация между тросовой системой и неразъемной шайбой 3.
Количество трюковых рам, их размеры, взаимное расположение, диапазоны изме- 55 нения углов определяются антропометрическими данными артистов-участников номера, их техническим мастерством, сложностью трюков, а также размерами помещения для работы (цирка).
Перекладины могут быть выполнены из металлического прута б - 28 мм из стали марки 60С2А по ГОСТ 14959 — 69 с последующей термообработкой до твердости HP c
35 — 49 ед.
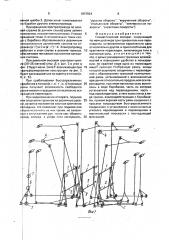
Работает аппарат следующим образом, Подъем рамы осуществляется при включении одного из электроприводов. Другой электропривод в этот момент работает в режиме тормоза и обеспечивает постоянное натяжение системы строптросов. При перемещении трюковой рамы (фиг. 2) по высоте на расстояние Л относительные удлинения канатов (ж.. 3, M) и (ж, 3, К) равны (если они образуют два симметричных прямоугольных треугольника) это позволяет осуществить их совместную заделку К в точке Н.
Относительные удлинения канатов (д. е - К) и (д. е — M) также равны, следовательно их можно объединить в точке О. После заделки в точках Н и О, канатные отрезки обкатывают свои однорядные ролики и заделываются в точке Р. Далее канат поступает на барабан электропривода. При подъеме рамки точка
Р будет опускаться, а за счет вышеуказанных разниц приращений пар канатов, получит угловое вращение относительно точки схода с барабана ЭП вЂ” 2, Вариант нового положения точки P показан пунктиром, Правая и левая трюковые рамы идентичны. а система растяжек симметрична, кроме вертикального перемещения они могут поворачиваться относительно перекладин (а, б) и (а, б ) и занимать любое угловое положение в пределах рабочей зоны (фиг. 1), Рабочая зона приблизительно составляет
160О и определяется задачами исполнения трюкового репертуара, согласно сценария циркового номера. Принцип принудительного поворота трюковой рамы для осуществления "лопинга" (вращения) показан на фиг. 3. Крепление в точках(а, б ) аналогично креплению центральной трюковой рамы в точках (д, е) на фиг. 2 и позволяет перемещать всю трюковую раму вверх-вниз. Это крепление на фиг. 3 не показано, При принудительном повороте трюковой рамы (в, г ) на угол а в точках (в,г ) канатные отрезки крепятся к шайбе фиг. 30 при помощи быстроразъемных карабинов.
Один канатный отрезок начинается в точке в (или г ) обкатывает группу роликов С, обкатывает группу роликов У и приходит к точке m. Второй канатный отрезок начинается в точке в (или г ) обкатывает группу роликов Х, обкатывает группу роликов И и приходит в точку m. В точке m осуществляется задела двух канатовс помощью неразь1837924 е н в и в д о р
Р о н л ф т б б ной шайбы 3. Далее канат наматывается барабан другого злектропривода.
При вращении электропривода по часой стрелке (в данном случае) рама займет ложение, показанное пунктиром. Угловое ащение точки m относительно точки схос барабана обуславливается различным носительным удлинением канатов на отзках (в r ) и С и (в, г ) — Х. Электропривод ботает в этом случае в режиме тормоза, еспечивая тем самым постоянное натяжее системы.
При реальном высоком цирковом купо(20-25 метров) углы Р, у, фиг. 3 и угол р г. 2 будут малы. Сила F возникающая при ансформировании конструкции на фиг. 3 дет раскладываться на заделку в точках (а, а, б ).
При срабатывании быстроразъемных рабинов в точках (в, г. в, г . ж. з) трюковые мы получают возможность свободного скачивания и вращения относительно оси ащения перекладин.
При видоизменении аппарата, подъеме и опускании турников на различные уров, остается постоянное жесткое крепление следних, что позволяет при подъеме или уске исполнять на них трюки, не связан е с отпусканием рук, такие как: обороты зад, вперед, в упоре стоя согнувшись, "русские обороты", "вкрученные обороты", "итальянские обороты", "келлеровские повороты". "скрестные повороты").
5 Формула изобретения
Гимнастический аппарат, содержащий по меньшей мере три горизонтальные перекладины, установленные параллельно одна относительно другой. и приспособление для
10 крепления перекладин, включающее тяги и: натяжные узлы, отл ич à ющийся тем, . что, с целью расширения трюковых возможностей и повышения удобства в пользовании, по крайней мере одна из перекладин
15 имеет съемную П-образную рамку, концы которой шарнирно соединены с перекладиной с образованием трюковой прямоугольной рамы, установленной с возможностью вращения относительно продольной оси пе20 рекладины, при этом натяжные узлы выполнены в виде барабанов, часть из которых установлена над перекладинами, часть— под перекладинами. а тяги выполнены в виде тросов, взаимодействующих с барабана25 ми, причем верхняя часть рамы соединенз с тросами посредством быстроразьемного соединения и установлена с возможностью углового перемещения и перемещения в вертикальной плоскости с последующей
30 фиксацией.
1837924
3837924
1837924
1837924
1837924
1837924
1837924
1837924
3837924
3837924
1837924
1837924
1837924
1837924
1837924, Соста вител ь А. Парши н
Техред М.Моргентал Корректор М, Керецман
Редактор
Производственно-издательский комбинат "Патент", r, Ужгород, ул.Гагарина, 101
Заказ 2881 Тираж Подписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР
113035, Москва. Ж-35, Раушская наб., 4/5