"устройство для обработки трехмерных поверхностей
Патент 485850
Авторы
Классы МПК
"устройство для обработки трехмерных поверхностей
Иллюстрации


Реферат
н1 4858 50
ОПИСАНИЕ
ИЗОБРЕТЕНИЯ
К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ
Союз Советсних
Социалистических
Респ1, бнин (61) Дополнительное к аат, санд-ву (22) Заявлено 06,04.73 (21) 1904335/25-8 (51) М. Кл. В 23р 1/00 с присоединением заявки №
Государственный комитет
Совета Министров СССР ио денем изобретений и открытий (23) Приоритет
Опубликовано 30.09.75. Бюллетень № 36
Дата опубликования описания 12.01.76 (53) УДК 621.9.048.4.06 (088.8) (72) Авторы изобретения (71) Заявитель
И. К. Воробьев и П. А. Давыдов
Центральное проектно-конструкторское бюро механизации и автоматизации (54) УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ТРЕХМЕРНЫХ
ПОВЕРХНОСТЕЙ
Изобретение относится к области электроэрозионной, электрохимической обработки и может быть использовано в машиностроении, в частности при изготовлении штампов и пресс-форм.
Известны устройства для обработки трехмерных поверхностей, содержащие эксцентрпковый вал, смонтированный в поворотной головке перпендикулярно оси ее вращения, имеющий привод вращения вокруг собственной оси и соединенный с помощью шатуна с направля|ощим механизмом, на подвижном звене которого закреплен электрод-инструмент.
Известное устройство недостаточно универсально, не позволяет выбрать требуемый зазор при изменении условий обработки, а главным его недостатком являются невысокие точность и производительность обработки.
С целью повышения производительности и точности обработки, на эксцентриковом валу выполнена наклонная цилиндрическая шейка, на которой установлена смонтированная в QTверстии шатуна втулка, имеющая возможность перемещения относительно вала и шатуна при помощи тяги, соединяющей втулку с одним из элементов винтовой пары, смонтированной на поворотной головке. Кроме того, винтовая пара снабжена дифференциальным приводом, выполненным в виде двух независимых планетарных передач с одинаковым передаточным отношением, сателлиты которых соединены с элементами винтовой пары, а солнечные колеса установлены соосно с ведущим валом устройства, причем одно из указанных колес установлено неподвижно, а другое с возможностью поворота.
С целью осуществления контроля за величиной перемещения инструмента, на одном солнечном колесе установлен лимб, на втором — нопиус.
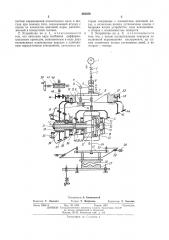
Существо изобретения поясняется чертежом.
Устройство содержит привод, состоящий из электродвигателя 1, муфты сцепления 2, редуктора 3, ведущего вала 4, на котором уста15 новлена двухсторонняя муфта 5. имеющая возможность соединения с жестко укрепленной на валу 4 верхней полумуфтой 6, или с нижней полумуфтой 7. Последняя закреплена соосно с неподвижным зубчатым колесом 8, 20 находящимся в зацепленшт с колесом 9, которое вместе с кривошппным диском 10 установлено на залу 11, смонтированным в водиле 12.
Муфта 5 связана с втулкой 13 свободно насаженной на вал 11. Кривошипный палец 14
25 входит в паз кулисы 15, жестко соединенной с коническим колесом 16, которое свободно установлено на ведущем валу 4. На нижнем конце вала 4 жестко укреплена головка 17, в которой в подшипниках 18 установлен экс30 центриковый вал 19, несущий коническое ко485850
53
3 лесо 20. На наклонную цилиндрическую шейку
21 эксцентрикового вала 19 надета втулка 22, имеющая возможность перемещения по шейке
21 и вдоль отверстия 23 шатуна 24, нижний конец которого установлен с возможностью вращения в плите 25. 11оступательное перемещение инструмента 26, обрабатывающего изделие 27 обеспечивается в трех взаимноперпендикулярных плоскостях направляющим механизмом, состоящим из трех поступательных пар 28, 29, 30. Втулка 22 тягой 31 со штырем
32 соединена с винтом 33. Для перемещения штыря 32 вдоль оси вала 19 предусмотрен паз
34 в шейке 21.
Соосно с валом 19 в головке 17 на подшипниках 35 и 36 установлены конические зубчатые сателлиты 37 и 38 дифференциального привода механизма регулирования эксцентриситета. Сателлит 37 закреплен на гайке 39, а сателлит 38 соединен поступательной парой с винтом 33, снабженным пазом 40 на сателлите
38 расположен винт 41, выступ 42 которого входит в паз 40. Сателлит 38 находится в зацеплении с неподвижным солнечным колесом
43, а сателлит 37 — с поворотным солнечным колесом 44, причем передаточные отношения обеих пар зубчатых колес одинаковы. На колесе 44 соосно с ним закреплено цилиндрическое зубчатое колесо 45, находящееся в зацеплении с шестерней 46. Последняя вместе с червячным колесом 47 укреплена на валу 48.
Червяк 49 снабжен маховичком 50. На колесе
43 закреплен нониус 51, а на колесе 44 лимб 52.
Устройство работает следующим образом.
Валу 19 сообщают одновременное вращение (качание) вокруг собственной оси Π— О и вращение вокруг оси Π— О, движение вокруг оси Π— О осуществляется вращением головки 17 от ведущего вала 4. Движение вокруг оси Π— О осуществляется при соединении муфты 5 и полумуфты i, чем предотвращается планетарное движение вала li. Этим обеспечивается неподвижность кривошипного диска
10 с пальцем 14, кулисы 15 и конического колеса 16. 11ри вращении головки 17 колесо 20 обкатывается по неподвижному колесу 16, приводя во вращение вал 19. 11лита 25 с инструментом 26 получает движение в плоскости вращения вала 19 по круговой траектории, радиус которой равен величине эксцентриситета. 11оворот плоскости вращения вала 19 вокруг оси Π— О обеспечивает движение инструмента по криволинейной траектории, описывая полную сферическую поверхность. Качание вала 19 вокруг оси Π— О для получения траектории по поверхности шарового сегмента осуществляется с помощью кривошипного кулисного механизма путем присоединения муфты 5 к полумуфте 6. В этом случае вал
11 получает планетарное движение вокруг вала 4, так как колесо 9обкатывается понеподвижному колесу 8. Вращающийся кривошипный палец 14 сообщает кулисе 15 качания, передаваемые коническими колесами 16 и 20 валу
19. Радиус сферической траектории инструмента 26 зависит от эксцентриситета наружной поверхности втулки 22 относительно оси 0 — О вала 19 и регулируется поворотом гайки 39 относительно винта 33, который через тягу 31 со штырем 32 перемещает втулку 22 по наклонной шейке 21. При этом ось втулки 22 смещается параллельно самой себе относительно оси вращения вала 19, тем самым обеспечивая регулирование радиуса сферической траектории.
Работа дифференциального привода происходит без остановки процесса обработки. При вращении ведущего вала 4 сателлиты 37 и 38 обкатываются по солнечным колесам 43 и 44 соответственно. Так как передаточные отношения обеих пар одинаковы, при неподвижности колеса 44 сателлиты 37, 38 вращаются с одинаковой угловой скоростью и, следовательно, не поворачиваются друг относительно друга. В этом случае винт 33 и гайка 39 также неподвижны друг относительно друга, обеспечивая сохранение эксцентриситета втулки 22.
Поворотом маховичка 50 поворачивают червяк 49, червячное колесо 47, вал 48 с шестерней 46 и колесо 45, укрепленное на колесе 44.
Таким образом колесо 44 поворачивают относительно неподвижного колеса 43, в результате чего сателлит 37 поворачивается на необходимый угол относительно сателлита 38. Так как сателлит 37 жестко соединен с гайкой 39, а сателлит 38 соединен поступательной парой с винтом 33, то гайка 39 поворачивается относительно винта 33, обеспечивая регулирование эксцентриситета как было описано выше. Угол подъема винтовой канавки червяка 49 выбирается меньше угла трения для предотвращения поворота колеса 44. Изменение величины перемещения инструмента прямо пропорционально углу поворота колеса 44 и зависит от передаточного отношения колес 37 и 44, шага резьбы винта 33 и гайки 39, угла наклона шейки 21 и оси 0 — Оь Для осуществления контроля за величиной перемещения инструмента в процессе обработки, неподвижное колесо 43 снабжено конусом 51, а колесо 44— лимбом 52.
Предмет изобретения
1. Устройство для обработки трехмерных поверхностей, содержащее эксцентриковый вал, смонтированный в поворотной головке перпендикулярно оси ее вращения, приводимый во вращение вокруг собственной оси и соединенный с помощью шатуна с направляющим механизмом, на подвижном звене которого закреплен электрод-инструмент, о т л и ч а ю щ е еся тем, что, с целью повышения производительности и точности обработки, эксцентриковый вал выполнен с наклонной цилиндрической шейкой, на которой установлена втулка, смонтированная в отверстии шатуна с возмож485850 торых соединены с элементами винтовой пары, а солнечные колеса установлены соосно с ведущим валом устройства: одно неподвижно, а второе с возможностью поворота.
5 3. Устройство по п. 2, отличающееся тем, что, с целью осуществления контроля за величиной перемещения инструмента, на одном солнечном колесе установлен лимб, а на втором — нониус. ф 5
50 47 ФЯ
Составитель А. Синяговский
Текред T. Миронова
Редактор Г. Лаковая
Корректор Е. Хмелева
Заказ 3266!15 Изд. № 1833
ЦНИИПИ Государственного комитета по делам изобретений и
Москва, Ж-35, Раушская
Типографии, пр. Сапунова. 2 ностью перемещения относительно вала и шатуна при помощи тяги, соединяющей втулку с одним из элементов винтовой пары, расположенной в поворотной головке.
2. Устройство по п. 1, отличающееся тем, что винтовая пара снабжена дифференциальным приводом, выполненным в виде двух независимых планетарных передач с одинаковым передаточным отношением, сателлиты коТираж 1061 Подписное
Совета Л1инистров СССР открытий наб., д. 4/5