"устройство для намотки нити на бобину
Патент 704877
Авторы
"устройство для намотки нити на бобину
Иллюстрации


Реферат
ОП ИКАНИЕ
ИЗОБРЕТЕНИЯ
К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ
Союз Советских
Социалистическими
Реслублини11704877 (61) Дополнительное к авт. сеид-ву (22) Заявлено 100877 (21) 2520409/28-12 (З1)М. К .. с присоединением. заявки Мо
В 65 Н 54/52
В 65 Н 59/38
Государственный комитет
СССР по делам изобретений и открытий (23) Приоритет
Опубликовано 251279. Боллвтень Ио47
Дата опубликования описания 281279 (53) УДК 677,023. 23 (088. 8) (72) Авторы изобретения
/ (54 ) УСТРОЙСТВО ДЛЯ НАМОТКИ .НИТИ HA БОБИНУ
Изобретение относится к текстильной промышленности, а именно к приемно-намоточным устройствам машиндля производства химических волокон с высокой и постоянной скоростью приема нити на вращающуюся бобину.
Известно устройство для намотки нити на бобину, содержащее бобинодержатель, связанный с электродвигателем, нитераскладчик, прикаточный ролик с механизмом прижима его к бобинодержателю, связанный с TaxOMSTрическим лреобразователем, задатчик и датчик скорости намотки (1).
Недостаток указанного устройства заключается в том, что лри высокоскоростном наматывании не удается избежать вибраций вращающихся тел и снижения качества намотки вследствие наличия эксцентриситета, некруглости и неполной уравновешенности бобинодержателя с патроном и прикаточного ролика, возникающих из-за конечной точности изготовления .деталей и сборки их лри монтаже устройства, а также вследствие переменности массы и частоты враще-, ния бобинодержателя в период наМа тывания.
Цель изобретения — повышение качества намотки нити при повышенных скоростях ее подачи.
Достигается это тем, что прикаточный ролик выпЬлнен полым и имеет амортизатор, связанный с его осью а тахометрический преобразователь смонтирован в ролике.
Считывающий элемент тахометрического преобразователя установлен на оси а его модулирующйй элемент— на поверхности полого ролика.
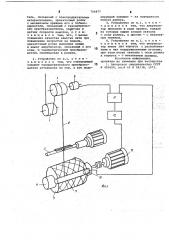
Амортизатор выполнен в виде пружин, каждая из которых связана с осью ролика, а другим — c механизмом прижима.
Амортизатор имеет два корпуса с расположенными в них подпружиненными штоками, при этом штоки связаны с осью ролика, а корпуса — с механизмом прижима.
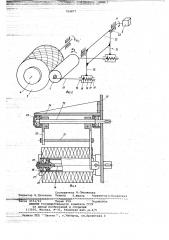
На Лиг.1 показана кинематическая схема устройства; на Аиг.2 — то же с амортизаторами в виде пружин; на Фиг.3 — то же, вид сбоку.
Устройство для намотки нити на бобину включает нижний.и верхний прядильные диски 1 и 2, нитераскладчик 3,. бобинодержатель 4 с наматы30
В.м.иванов, О.н,Нижибицкий, э.A,толкачев и О,В.пономарев
Ленинградский ордена Трудового Красного ЗнаМени институт текстильной и легкой промышленности имени С.М.Кирова и специальное конструкторско-технологическое бюро машин (71) 3аявители химических волокон ленинградского механического объединения . имени К.Маркса
704877 ваемой паковкой 5, к которой с помощью приводного устройства 6 прижимается прикаточный ролик 7, служащий для измерения скорости наматывания нити 8 на паковку, а также для получения заданной плотности паковки. С ротором верхнего прядильного диска связай датчик скорости
9 подачи нити, а с паковкой 5 фрикционно связан прикаточный ролик 7 с размещенными внутри его тахоt0
- метрическим преобразователем 10.
Выходы датчика скорости 9 подачи нити в намотку и тахометрического преобраэОвателя 11, выход которого подключен -к регулируемому преобразователю 12, Выход регулируемого преоб- <5 ,разрвателя 12 подключен к электродвигателю 13 вращения бобины. Ось
14 прикаточного ролика-7 закрепле- . на на концах штоков 15, установленных в направляющих 16 корпусов 17. 2О
Внутри корпусов 17 размещены пружины 18, каждая из которых одним кон"цом упирается в расположенный между направляющими 16 кольцевой выступ .19 в расположенный между направляющими 16 кольцевой выступ 19 штока
15, а вторым концом — в дном корпуса 27. Корпусы 17 жестко прикреплены к концам рычагов 20, образующих совместно со связывающей рычаги ЗО поперечной 21 и валом 22 жесткую раму. Оси вращения паковки прикаточного ролика 7 и вал 22 поворотной рамы Механизма прижима параллельны между собой. Вал 22 установлен в подшипниках 23 и с помощью крон штейна 24-крепится к облицовке машины 25. Вал 22 соединен с приводным устройством 6 прижйма ролнка к паковке, в качестве которого может быть использовано одно из известных устройств с грузовым гидраэлическйм или пневматическим приводом. Невращающаяся ось 14 прикаточного ролика 7-расположена в шарикоподшипниках 26. На наружных кольцах под- 45 шипников закреплен ротор 27 прикаточного ролика 7 :выполненный в виде †поло цилиндра. Иодулирующий элемент
28 тахометрического преобразователя 10 жестко соединен с ротором, напри- 5О мер, закреплен на роторе с внутренней стороны, Считывающее устройство
29 установлено на невращающейся оси
14 прикаточного ролика 7, Для свободного доступа к тахометрическому
-преобразователю 10 опорные подшипники смещены симметрично от торцов. прикаточного ролика 7 к центру.
Приводное устройство 6 с определенным усилием прижимает к вращающейся паковке 5 прикаточный ролик 7, @ который обкатывая наружный слой паковки, преобразует ее окружную скорость э угловую скорость ролика.
Кроме того, укатыэая боковую поверх. ность паковки с определенным давле- 65 нием, прикаточный ролик / способствует формированию требуемой плотности паковки, Вследствие эксцентриситета и некруглости патрона бобинодержателя в паковки прикаточный ролик 7 в процессе наматывания перемещается.по направлению к паговке и от нее, совершая, таким образом, колебания, сопровождающиеся появлением инерционных сил. Благодаря упругой связи прикаточного ролика T с механизмом прижима и уменьшению массы прикаточ ного ролика 7 силы сжатых пружин
18, действующие через штоки 15 на концы оси прикаточного ролика 7, преодолевают силы инерции ролика и последний остается в непрерывном фрикционном зацеплении с паковкой.
Частотный тахометрический преОбразователь 10 выполнен на базе модуляторного параметрического преобразователя угловых перемещений в число импульсов и состоит из модулирующего элемента 28 и считывающего устройства 29. При этом применен такой параметрический преобразователь перемещений, который по прин цйпу действия при вращении не создает дополнительных моментов сопротивления например, электромагнитного момента, трения или аэродинамического.
В качестве безмоментных преобразователей. перемещения. могут быть исполь.— зованы, например, Фотоэлектрические или емкостные преобразователи, а также преобразователи с.использованием магнито-резисторов, датчиков
Холла и некоторые другие. . Тахометрический преобразователь.
10 и датчик 9 угловой скорости верхнего прядильного диска посылает в устройство сравнения 11 электрические сигналы, пропорциональные соответственно скорости наматывания и подачи нити в намотку. По мере роста диаметра паковки возрастает ее окружная скорость и угловая скорость прикаточного ролика, что приводит к изменению частоты выходного сигнала тахометрического преобразователя 10 °
Устройство сравнения сигналов скорости 11 выявляет Факт отклонения соотношения контролируемых скоростей от заданного значения и через регулируемый преобразователь воздействует на..электродвигатель бобинодержателя, который снижает свою угловую скорость до значения, при котором восстанавливается заданное значение скоростей наматывания и подачи нити в намотку.
Формула изобретения
1. Устройство для намотки нити на бобину, содержащее бобинодержа704877 тель, связанный с электродвигателем нитераскладчик, нрикаточный ролик с механизмом прижима его к бобинодержателю, связанный, с тахометрическим преобразователем, захватчик и датчик скорости намотки, o т л ич а ю щ е е с я тем, что, с целью повышения качества намотки нити при повышенных скоростях ее подачи прикаточный ролик выполнен полым и имеет амортизатор, связанный с его осью, а тахометрический преобразо.ватель смонтирован в ролике, 2. Устройство по п.1, о т л ич а ю щ е е с я тем, что считывающий элемент тахометрического. реобрasoawe a установлен на оси, а его модулирующий элемент — на поверхности полого ролика.
3, Устройство по п.1, о т л ич а ю щ е е с я тем, что амортизатор выполнен в виде пружин, каждая из которых одним концом связана с осью ролика, а другим — с механизмом прижима, 4, Устройство по п.1, о т л ич а ю щ е е с я тем, что амортизатор имеет два корпуса с распобоженными в них подпружиненными штоками, при этом штоки связаны с осью ролика а корпуса — с механизмом прижима.
Источники информации, принятые во внимание при экспертизе
35 1. Авторское свидетельство СССР
Р 40162.4, кл.В б5 Н 59/38, 1971, 704877
Составитель A-Смолякова .
Редактор Н.Грязнова Техред 3.фанта . Корректор О.Ковинская
5 аказ 8333/63 Гираж 958 Подписное
ЦНИИПИ Государственного комитета СССР по.делам изобретений и открытий.
113035, Москва, Ж-35., Рауйская наб.,д.4j5 бйлиал ППП Патент, г.Ужгород, ул.Проектная,4