"рычажный механизм в.п.саблина с гибкимзвеном
Патент 848819
Авторы
Классы МПК
"рычажный механизм в.п.саблина с гибкимзвеном
Иллюстрации


Реферат
ОП ИСАНИЕ
ИЗОБРЕТЕН ИЯ
К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ
CoIo3 Советских, Социалистических
Респубики («) 848819 (6t) Дополнительное к авт. свил-ву(22)Заявлено 11.05.79 (21) 2765230/25-28 (51)М. Кл.
F 16 H 19/06 с присоединением заявки Л вЂ”
1Ъеудерстеаннмй кемитет. СССР до делам изобретений и еткрытий (23) Приоритет
Опубликовано 23. 07. 81 ° Бюллетень .%27
Дата опубликования описания24.07.81 (53) УДК 621.855. (088. 8) (71) Заявитель (54) РЫЧАЖНЫИ МЕХАНИЗМ В.П.САБЛИНА С ГИБКИМ ЗВЕНОМ
Изобретение относится к машино. строению и может быть использовано в устройствах для преобразования.вращательного движения в поступательное по замкнутой траектории с выстоем ведомого звена.
Известен рычажный механизм с гибким звеном, содержащий, по крайней мере, два колеса равного радиуса, охватывающее их гибкое звено и закрепленный на нем по нормали со стороны расположения колес поводок, длина которого равна радиусу колеса Dl
Недостатком этого механизма явля" ется невысокая надежность вследствие недостаточной фиксации положения по-. водка по нормали относительно гибкого звена.
Цель изобретения - повышение надежности работы.
Указанная цель достигается тем, что поводок снабжен жестко связанным с иим дополнительным плечом, размещенным с противоположной стороны расположения колес, а механизм — рычагом, шарнирно связанным одним концом с гибким звеном, а другим — со свободным концом дополнительного плеча, длина гибкого звена между точками крепления рычага и поводка ие больше длины дуги охвата колеса гибким звеном, а ось шарнира крепления рычага с дополнительным плечом расположена на пертО пендикуляре, проведенном к середине прямой, соединяющей ось шарнира крепленття рычага к гибкому звену при прохождении поводка в крайней точке дуги охвата с точкой, лежащей на про15 должении касательной к колесам параллельной линии, соединяющей центры колес, на расстоянии, равном длине дуги между точками крепления рычага и поводка на гибком звене.
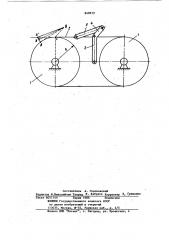
На.чертике изображена кинематичес, кая схема предлагаемого механизма (пунктиром показано положение механизма при нахождении поводка в край3 84881 ней точке дуги охвата гибким звеном колеса).
Механизм содержит колеса 1 равного радиуса, охватывающее их гибкое звено
2, закрепленный на нем по нормали со стороны расположения колес 1 поводок
3, длина которого равна радиусу колеса l .
Поводок 3 снабжен жестко связанным с ним дополнительным плечом 4, 1О размещенным с противоположной стороны расположения колес .I. Механизм снабжен также рычагом 5, шарнирно связанным одним концом с гибким звеном 2, а
ДРУгим — со сВобОдНЫМ КОНЦОМ ДОПОЛИИ- 15 тельного плеча 4. Длина дуги гибкого звена 2 между точками А и С, равная расстоянию между точками крепления рычага 5 и поводка 3 к гибкому звену 2, должна быть не больше длины дуги ох- 20 вата колеса 1 гибким звеном 2. Ось шарнира крепления рычага 5 с дополнительным плечом 4 расположена на перпендикуляре 08, проведенном к середине прямой АА,,соединяющей ось шарнира крепления рычага 5 к гибкому звену 2 при прохождении поводка 3 в крайней точке С дуги охвата с точкой
А, лежащей на продолжении касательной к.колесам 1 параллельной линии, сое.> диняющей центры колес 1., на расстоянии, равном длине дуги АС между точками крепления рычага 5 и поводка 3 на гибком звене 2.
Механизм работает следующим образом.
При вращении колес I гибкое звено
2 перемещает поводок 3, причем свободный конец поводка 3, размещенного на гибком. звене 2 и закрепленного на нем по нормали со стороны расположения колес l, совершает движение по .замк" нутой траектории с выстоями в момент огибания поводка 3 колес I. При этом рычаг 5 с дополнительным плечом 4 поводка 3 обеспечивает надежную фик9 4 сацию положения поводка 3 по нормали относительно гибкого звена 2, Предлагаемый механизм обладает широкими функциональными возможностями и может быть использован в автооператорах, манипуляторах и транспортерах. формула изобретения
Рычажный механизм с гибким звеном, содержащий, по крайней мере, два колеса равного радиуса, охватывающее их гибкое звено и закрепленный на нем по нормали со стороны расположения колес поводок, длина которого равна радиусу колеса, о т л и ч а ю щ и йс я .тем, что, с целью повышения надежности работы, поводок снабжен жестко связанным с ним дополнительным плечом, размещенным с противоположной стороны расположения колес, а механизм — рычагом, шарнирно связанным одним концом с гибким звеном, а другим — со свободным концом дополнительного плеча, длина гибкого звена между точками крепления рычага и поводка не больше длины дуги охвата колеса гибким звеном, а ось шарнира крепления рычага с дополнительным плечом расположена на перпендикуляре, проведенном к середине прямой, соединяющей ось шарнира крепления рычага к гибкому звену при прохождении поводка в крайней точке дуги охвата с точкой, лежащей на продолжении касательной к колесам параллельной линии,.соединяющей центры колес, на расстоянии, равном длине дуги между точками крепления рычага и поводка на гибком звене.
Источники информации, принятые во внимание при экспертизе
1 . Кожевников С .Н. и др . Механизмы. М ., "Машиностроение", 1976, с. 550, рис. 9.32. (прототип).
848819
Составитель А. Гороховский
Редактор И.Николайчук Тех е Н. Бабурка Ко екав
Заказ 605! 44: Тиран 1006 Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35 Раушская наб. д. 4/5
Филиал ППП Патент, г. Уигород, ул. Проектная, 4