Иллюстрации к патенту
1613319
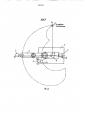
Способ определения фактического положения систем координат звеньев манипулятора
")