Иллюстрации к патенту
2424893
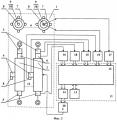
Адаптивный мобильный пространственный робот-манипулятор и способ организации движений и контроля физико-механических свойств и геометрической формы контактируемой поверхности и траектории перемещения с его помощью
")