Иллюстрации к патенту
2466858
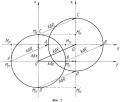
Способ контроля точности контурных перемещений промышленных роботов
")