Иллюстрации к патенту
2585792
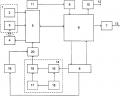
Способ автономной компенсации инструментальных погрешностей бесплатформенных инерциальных навигационных систем и устройство для его осуществления
")