Иллюстрации к патенту
2619542
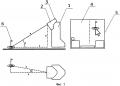
Способ управления подвижным роботом
")