Иллюстрации к патенту
2319604
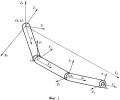
Способ управления пространственным движением манипулятора как системой с распределенными параметрами на заключительном этапе движения при выходе в заданное положение
")